
 下载APP
下载APP 报料
报料 关于
关于
2016-11-22 16:50:45
一、画面出现横纹/画面不够柔和
这两种问题都可以归结到画面的帧率上,帧率一般以fps(Frames Per Second)来表示,是指1秒钟的画面内有几帧图片,一般来说,帧率越高,画面则越流畅。
出现横纹,就是可能帧率过低,导致了画面不连贯,此时适当提高帧率即可。但是也有一些飞手希望画面柔和,后期调色后能够产生厚重的“电影感”,那么此时就可以适当降低帧率,一般降为24帧即可。

二、画面有果冻效应
果冻效应一般出现在画面大幅度移动或者机身有强烈震动的时候,相机的传感器来不及实时捕捉画面,于是就产生了画面断层的现象。应对这种情况,一种是手动降低快门速度,让传感器有充分的时间捕捉当前的画面;另一种就只能加强无人机的防抖。
我们为大家整理过解决果冻效应的专题,大家可以点击篇末的阅读原文查看【航拍课堂:如何解决航拍中的果冻效应】

三、螺旋桨入镜
螺旋桨入镜是许多四轴翼无人机经常发生的情况,尤其是在高速移动的情况下,机身往往会发生倾斜,螺旋桨很容易会入镜。
解决的方法有三个,首先我们可以调低镜头的视角,让它稍稍向下倾斜,这样就能避开螺旋桨;或者我们尽量避免高速移动,打杆的时候轻柔一些;最后,我们可以采用画面裁剪的方法,在后期的时候,将有螺旋桨入镜的上面一部分画面裁减掉。

四、图传信号不稳定
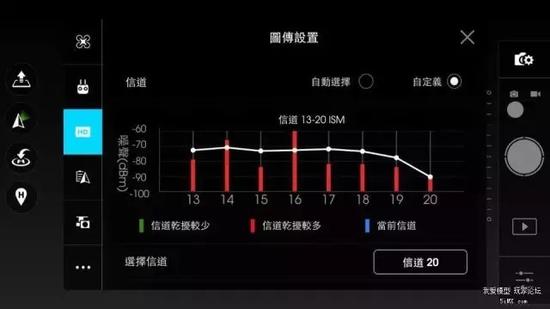
由于图传具有低延迟、高清的特点,所以对于信号的要求很高。目前国内由于频带的法律法规限制,大疆等一系列无人机都对图传的信道进行了严格的限制。以大疆为例,默认只有8个信道可供选择切换。当我们在城市等信号比较复杂的区域飞行,就会发现一些信道被严重污染。
但是我们也不建议大家盲目通过技术手段破解限制,想要解决图传卡顿、信道嘈杂的办法,只有在起飞前仔细观察信道情况,合理选择信道,同时也尽量避免在城市等区域飞行。
五、无人机信号失联
虽说无人机的厂家都会给出数百米甚至数公里的信号传输距离参数,但是这都是理想环境下测试的结果。实际上城市的干扰、地磁场环境的变换等因素,都会使得无人机在有效范围内就出现失联的情况。
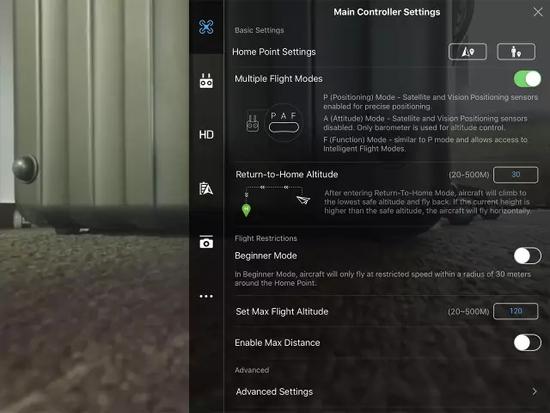
目前最多的失联情况,是发生在无人机飞至某栋建筑物后侧之后,这时钢筋混凝土的建筑物,会遮挡住无人机与遥控器之间的信号传输,尤其是在超视距飞行时,我们往往不经意间就让无人机飞到了建筑物的后方。对此除了在飞行前仔细规划航线,还要切记飞行前设定好返航高度,一定要将返航高度设为高于附近最高的建筑物,这样一旦无人机失联,就会上升至预设高度,直线返回返航点。
六、GPS信号不够,只能进入姿态模式
无人机在室外时,是依靠GPS信号确认自己的方位和高度的,GPS搜索到的卫星数量越多,信号越强,那么无人机就越稳定。
许多人说自己明明身处身外,还是搜不到足够的卫星数,实际上不单室外,GPS对于开阔程度也有要求,需要附近开阔无遮挡才可。一般来说,我们建议大家在起飞后,在低空滞留一会儿,让无人机搜索到更多的卫星数量后,继续进行下一步的飞行。

七、打杆操作不明显/过于明显
无人机的镜头多为广角,加之“远小近大”的关系,所以当我们通过屏幕观察时,觉得无人机移动颇为缓慢,但实际上无人机的移动速度是非常快的,一些无人机在运动模式下甚至可以达到20m/s的速度!
一些飞手,尤其是新手会觉得明明只打了一点杆,无人机的反应却非常大,这种情况下,我们可以通过调整遥控器摇杆灵敏度来调节。同理,也可以调高灵敏度,以便高速操作无人机。

八、无人机漂移,乱动
无人机是非常精密的仪器,对于环境的干扰非常敏感,而这其中,地磁环境的影响最大。依靠视觉定位,即便没有GPS,无人机也能够保持一定的稳定,但是地磁环境的变化,会严重影响飞行稳定。因此我们也建议大家在新的地方飞行时,一定要进行指南针校准。
不过校准时也要注意避开高压线、钢筋建筑物等环境,这样才能准确校准。

责编:实习生7
来源:机器人网
我要问
 湘公网安备 43010502000374号
湘公网安备 43010502000374号